|
CCCoreLib 31 May 2022
CloudCompare Core algorithms
|
|
CCCoreLib 31 May 2022
CloudCompare Core algorithms
|
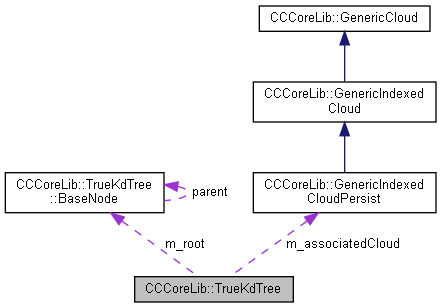
Proper KD-tree implementation. More...
#include <TrueKdTree.h>
Classes | |
| class | BaseNode |
| Tree base node. More... | |
| class | Leaf |
| Tree leaf. More... | |
| class | Node |
| Tree node. More... | |
Public Types | |
| using | LeafVector = std::vector< Leaf * > |
| A vector of leaves. | |
Public Member Functions | |
| TrueKdTree (GenericIndexedCloudPersist *cloud) | |
| Default constructor. | |
| ~TrueKdTree () | |
| Destructor. | |
| GenericIndexedCloudPersist * | associatedCloud () const |
| Returns the associated cloud. | |
| bool | build (double maxError, DistanceComputationTools::ERROR_MEASURES errorMeasure=DistanceComputationTools::RMS, unsigned minPointCountPerCell=3, unsigned maxPointCountPerCell=0, GenericProgressCallback *progressCb=nullptr) |
| Builds KD-tree. More... | |
| void | clear () |
| Clears structure. | |
| double | getMaxError () const |
| Returns max error threshold used for planarity-based split strategy. | |
| DistanceComputationTools::ERROR_MEASURES | getMaxErrorType () const |
| Returns max error estimator used for planarity-based split strategy. | |
| bool | getLeaves (LeafVector &leaves) const |
| Returns all leaf nodes. | |
Static Public Attributes | |
| static const uint8_t | X_DIM = 0 |
| static const uint8_t | Y_DIM = 1 |
| static const uint8_t | Z_DIM = 2 |
| static const uint8_t | NODE_TYPE = 0 |
| static const uint8_t | LEAF_TYPE = 1 |
Protected Member Functions | |
| BaseNode * | split (ReferenceCloud *subset) |
| Recursive split process. | |
Protected Attributes | |
| BaseNode * | m_root |
| Root node. | |
| GenericIndexedCloudPersist * | m_associatedCloud |
| Associated cloud. | |
| double | m_maxError |
| Max error for planarity-based split strategy (see m_errorMeasure) | |
| DistanceComputationTools::ERROR_MEASURES | m_errorMeasure |
| Error measurement. | |
| unsigned | m_minPointCountPerCell |
| Min number of points per cell (speed-up) More... | |
| unsigned | m_maxPointCountPerCell |
| Max number of points per cell (speed-up) More... | |
Proper KD-tree implementation.
| bool TrueKdTree::build | ( | double | maxError, |
| DistanceComputationTools::ERROR_MEASURES | errorMeasure = DistanceComputationTools::RMS, |
||
| unsigned | minPointCountPerCell = 3, |
||
| unsigned | maxPointCountPerCell = 0, |
||
| GenericProgressCallback * | progressCb = nullptr |
||
| ) |
Builds KD-tree.
| maxError | maximum error per cell (relatively to the best LS plane fit) |
| errorMeasure | error measurement |
| minPointCountPerCell | minimum number of points per cell (can't be smaller than 3) |
| maxPointCountPerCell | maximum number of points per cell (speed-up - ignored if < 6) |
| progressCb | the client application can get some notification of the process progress through this callback mechanism (see GenericProgressCallback) |
|
protected |
Max number of points per cell (speed-up)
Ignored if < 6
|
protected |
Min number of points per cell (speed-up)
Can't be < 3