|
CCCoreLib 31 May 2022
CloudCompare Core algorithms
|
|
CCCoreLib 31 May 2022
CloudCompare Core algorithms
|
ICP Parameters. More...
#include <RegistrationTools.h>
Public Attributes | |
| CONVERGENCE_TYPE | convType |
| Convergence type. | |
| double | minRMSDecrease |
| The minimum error (RMS) reduction between two consecutive steps to continue process (ignored if convType is not MAX_ERROR_CONVERGENCE) | |
| unsigned | nbMaxIterations |
| The maximum number of iteration (ignored if convType is not MAX_ITER_CONVERGENCE) | |
| bool | adjustScale |
| Whether to release the scale parameter during the registration procedure or not. | |
| bool | filterOutFarthestPoints |
| If true, the algorithm will automatically ignore farthest points from the reference, for better convergence. | |
| unsigned | samplingLimit |
| Maximum number of points per cloud (they are randomly resampled below this limit otherwise) | |
| double | finalOverlapRatio |
| Theoretical overlap ratio (at each iteration, only this percentage (between 0 and 1) will be used for registration. | |
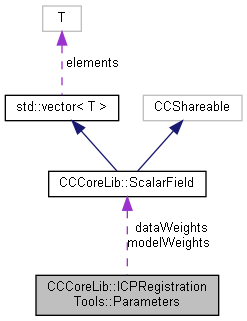
| ScalarField * | modelWeights |
| Weights for model points (i.e. only if the model entity is a cloud) (optional) | |
| ScalarField * | dataWeights |
| Weights for data points (optional) | |
| int | transformationFilters |
| Filters to be applied on the resulting transformation at each step (experimental) - see RegistrationTools::TRANSFORMATION_FILTERS flags. | |
| int | maxThreadCount |
| Maximum number of threads to use (0 = max) | |
| bool | useC2MSignedDistances |
| Whether to compute signed C2M distances. More... | |
| NORMALS_MATCHING | normalsMatching |
| Normals matching method. | |
ICP Parameters.
| bool CCCoreLib::ICPRegistrationTools::Parameters::useC2MSignedDistances |
Whether to compute signed C2M distances.
Useful when registering a cloud with a mesh AND partial overlap, to move the cloud towards the outside of the mesh