Sensors\Camera Sensor\Compute points visibility (with octree)
Jump to navigation
Jump to search
Menu
This tool is accessible via the 'Edit > Sensors > Camera Sensor > Compute points visibility (with octree)' menu.
Description
Flags the points of a cloud depending on whether they are viewed by the selected (camera) sensor or not.
The visibility check is done for the 'active' camera position. Per-point visibility information is stored in a scalar field:
- 0 = NOT VISIBLE
- 1 = VISIBLE

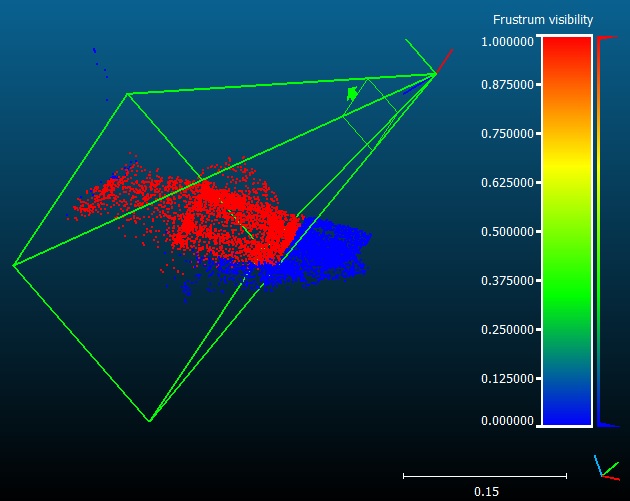
Result of a 'visibility' computation