Difference between revisions of "Density"
Jump to navigation
Jump to search
(→Output) |
(→Menu) |
||
| Line 1: | Line 1: | ||
= Menu = | = Menu = | ||
This tool is accessible via the 'Tools > Other > Density' menu. | This tool is accessible via the 'Tools > Other > Density' menu. | ||
| + | |||
| + | Since version 2.11, this tool is part of 'Tools > Other > [[Compute geometric features]]'. | ||
= Description = | = Description = | ||
Latest revision as of 13:55, 19 February 2022
Menu
This tool is accessible via the 'Tools > Other > Density' menu.
Since version 2.11, this tool is part of 'Tools > Other > Compute geometric features'.
Description
This tool estimates the density of a point cloud.
Procedure
Select one or several point clouds then launch this tool.
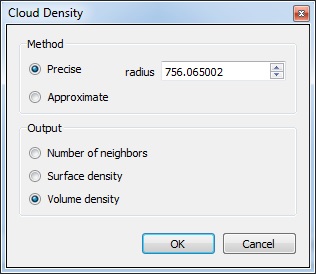
A dialog will appear:

Precise or Approximate
Two methods can be used to compute the density:
- either 'Precise': the density is estimated by counting for each point the number of neighbors N (inside a sphere of radius R)
- or 'Approximate': the density is simply estimated by determining the distance to the nearest neighbor (which is generally much faster). This distance is considered as being equivalent to the above spherical neighborhood radius R (and N = 1).
Output
The density output can be:
- the number of neighbors N (only available in 'Precise' mode)
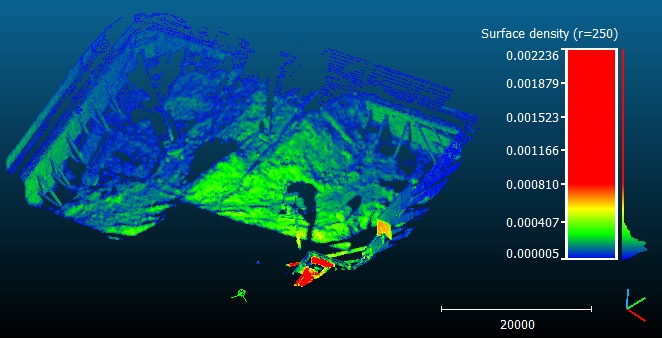
- a surface density: number of neighbors divided by the neighborhood surface = N / (Pi.R2)
- a volume density: number of neighbors divided by the neighborhood volume = N / (4/3.Pi.R3)

Density output example
Notes:
- a point with no neighbor in the spherical neighborhood will have an invalid (NaN) density.
- the central point is always used for computing the density (even when the output is the 'number of neighbors' as we consider the number of neighbors of the 'position in space' of each point). Therefore the density will be actually equal to kNN + 1 where kNN is the number of neighbors of each point)